
EVA Models 1/32 Scale Lunar Roving Vehicle
History
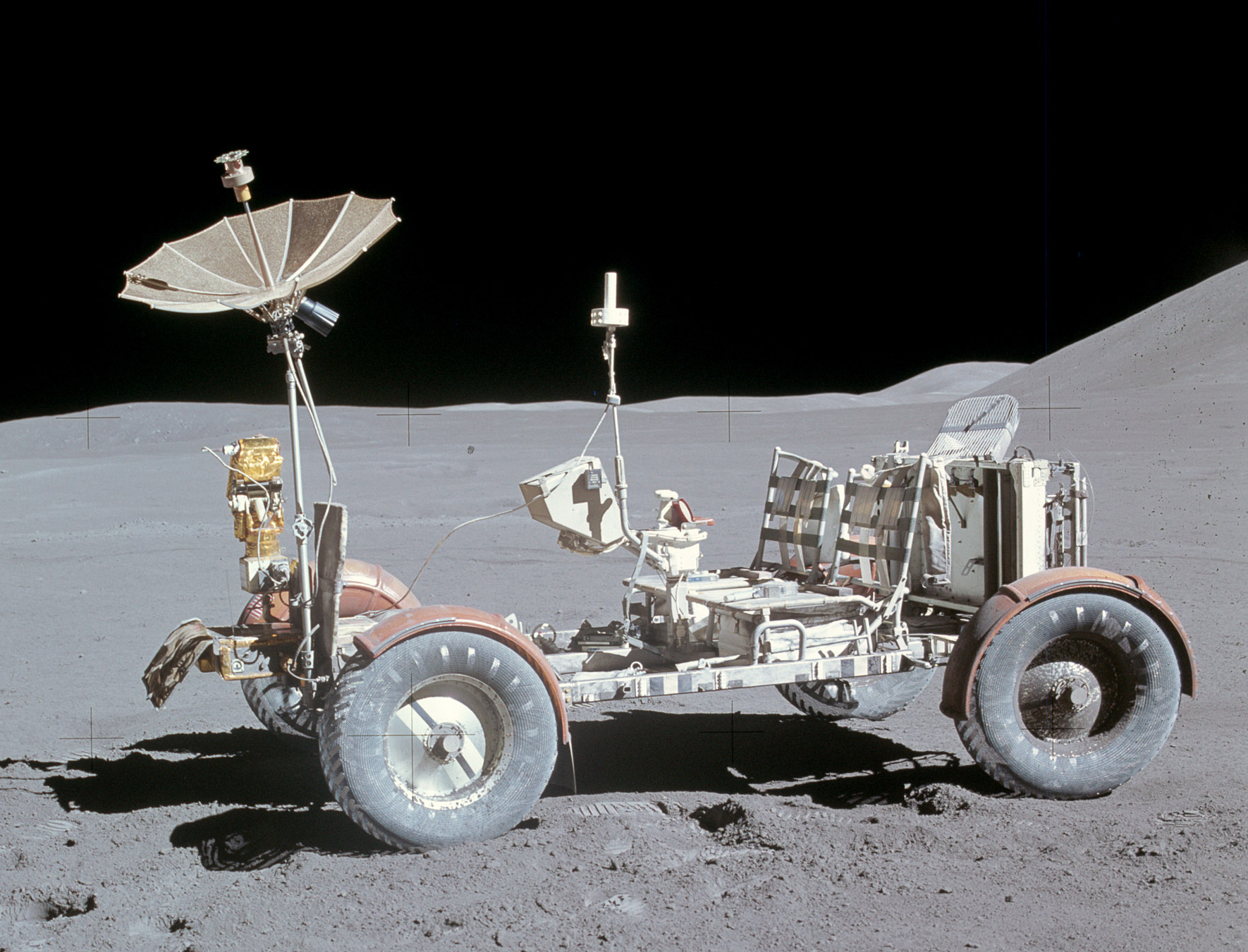
The Apollo Lunar Roving Vehicle (LRV) was an electric-powered vehicle designed to operate in the low-gravity vacuum of the Moon and to be capable of traversing the lunar surface, allowing the Apollo astronauts to extend the range of their surface extravehicular activities. Three LRVs were used on the Moon: one on Apollo 15 by astronauts David Scott and Jim Irwin, one on Apollo 16 by John Young and Charles Duke, and one on Apollo 17 by Eugene Cernan and Harrison Schmitt.
During 1965 and 1967, the Summer Conference on Lunar Exploration and Science brought together leading scientists to assess NASA’s planning for exploring the Moon and to make recommendations. One of their findings was that a Local Science Service Module (LSSM) was critical to a successful program and should be given major attention. At MSFC, von Braun established the Lunar Roving Task team, and in May 1969, NASA selected the Lunar Roving Vehicle (LRV) for use in manned lunar missions and approved the Manned Lunar Rover Vehicle Program as a MSFC hardware development.
On 11 July 1969, just before the successful Moon landing of Apollo 11, a request for proposal for the final development and building the Apollo LRV was released by MSFC. Boeing, Bendix, Grumman and Chrysler submitted proposals. Following three months of proposal evaluation and negotiations, Boeing was selected as the Apollo LRV prime contractor on 28 October 1969. Boeing would manage the LRV project in Huntsville, Alabama. As a major subcontractor, General Motors’ Defense Research Laboratories in Santa Barbara, California, would furnish the mobility system (wheels, motors, and suspension), Boeing in Seattle, Washington, would furnish the electronics and navigation system. Vehicle testing would take place at the Boeing facility in Kent, Washington, and the chassis manufacturing and overall assembly would be at the Boeing facility in Huntsville.
The first cost-plus-incentive-fee contract to Boeing was for $19,000,000 and called for delivery of the first LRV by 1 April 1971. Cost overruns, however, led to a final cost of $38,000,000, which was about the same as NASA’s original estimate. Four lunar rovers were built, one each for Apollo missions 15, 16, and 17; and one used for spare parts after the cancellation of further Apollo missions. Other LRV models were built: a static model to assist with human factors design; an engineering model to design and integrate the subsystems; two one-sixth gravity models for testing the deployment mechanism; a one-gravity trainer to give the astronauts instruction in the operation of the rover and allow them to practice driving it; a mass model to test the effect of the rover on the LM structure, balance, and handling; a vibration test unit to study the LRV’s durability and handling of launch stresses; and a qualification test unit to study integration of all LRV subsystems.
LRVs were used for greater surface mobility during the Apollo J-class missions, Apollo’s 15,16 and 17. The rover was first used on 31 July 1971, during the Apollo 15 mission. This greatly expanded the range of the lunar explorers. Previous teams of astronauts were restricted to short walking distances around the landing site due to the bulky space suit equipment required to sustain life in the lunar environment. The range, however, was operationally restricted to remain within walking distance of the lunar module, in case the rover broke down at any point. The rovers were designed with a top speed of about 8 mph (13 km/h).
The LRV was developed in only 17 months and performed all its functions on the Moon with no major anomalies. Scientist-astronaut Harrison Schmitt of Apollo 17 said, “The Lunar Rover proved to be the reliable, safe and flexible lunar exploration vehicle we expected it to be. Without it, the major scientific discoveries of Apollo 15, 16, and 17 would not have been possible; and our current understanding of lunar evolution would not have been possible.”
The LRVs experienced some minor problems. The rear fender extension on the Apollo 16 LRV was lost during the mission’s second extra-vehicular activity (EVA) when John Young bumped into it while going to assist Charles Duke. The dust thrown up from the wheel covered the crew, the console, and the communications equipment. High battery temperatures and resulting high power consumption ensued. No repair attempt was mentioned.
The fender extension on the Apollo 17 LRV broke when accidentally bumped by Eugene Cernan with a hammer handle. Cernan and Schmitt taped the extension back in place, but due to the dusty surfaces, the tape did not adhere and the extension was lost after about one hour of driving, causing the astronauts to be covered with dust. For their second EVA, a replacement “fender” was made with some EVA maps, duct tape, and a pair of clamps from inside the Lunar Module that were nominally intended for the moveable overhead light. This repair was later undone so that the clamps could be taken inside for the return launch.
Also on the Apollo 15 mission during the initial checkout it was discovered that the front steering mechanism did not work. However the rover was designed with both front and rear steering so that on the first traverse only the rear steering was used. Prior to the second traverse the astronauts succeeded in freeing the front steering mechanism.
The color TV camera mounted on the front of the LRV could be remotely operated by Mission Control in pan and tilt axes as well as zoom. This allowed far better television coverage of the EVA than the earlier missions. On each mission, at the conclusion of the astronauts’ stay on the surface, the commander drove the LRV to a position away from the Lunar Module so that the camera could record the ascent stage launch. The camera operator in Mission Control experienced difficulty in timing the various delays so that the LM ascent stage was in frame through the launch. On the third and final attempt (Apollo 17), the launch and ascent were successfully tracked.
(Excerpted from Wikipedia)
The Model
I bought the EVA Models 1/32 Scale Lunar Roving Vehicle (LRV) at the 1998 IPMS Nationals, which was held in Santa Clara, California. With resin castings which are delicate and crisp and the well-detailed photo-etched parts, the kit is typical for a multi-media offering. A very nice, well-detailed 3-page assembly instruction sheet was included. Two astronaut figures and a lunar base are also included in the kit.
The box contains 93 resin parts; 10 of which make up the two figures, plus the base and one other that is the alignment former for the High-Gain Antenna. Also there are 24 photo etch parts on a single fret and some miscellaneous styrene rod. There are many small and delicate resin parts, so care needs to be taken in removing them from their carrier. I used an X-acto micro saw to remove the smaller resin parts. There were some minor pinholes in some parts and occasionally while sanding the carrier remnants off of the parts, more were revealed. I found that Squadron White Filler Putty worked just fine in filling those holes.
I started work on the kit with the wheels and fenders. After cleaning up the wheel, a determination of what direction was “up” based on the location of the attachment points for the suspension was needed. Then a hole was drilled straight into the bottom of each wheel to accept a short length of .050 stainless steel wire to attach it to the base. The “chevron treads” were a breeze to put on, I just follow the directions given. The only change I made was to use 3/16” diameter rod instead of the 1/4” suggested to form the chevrons so that when they are attached, they are definitely pushed out to fit the contour of the wheels. I made sure to create two pairs of wheels; all of the chevrons needed to “point” forward when the wheels are attached to the chassis frame.
Painting the wheels started by airbrushing the inside and outside wheel hubs with Testor’s Metal Master Non-Buffing Steel. Paper masks were then applied to the hubs and the rest of the wheels were airbrushed with Testor’s Metalizer Buffing Titanium. After letting the wheels sit of a day, the outer portions of the disks were masked and the center hubs on the outside the electrical motor housings on the inside were airbrushed flat white. After removing the masking the attachment points for the suspension were brush painted with Testor’s Metalizer Non-Buffing Aluminum. Taking a small amount of SNJ’s aluminum polishing powder and a old cotton shirt, the chevrons were lightly rubbed to give them a slightly different sheen that the rest of the wheel. For the final step on the wheels I used Scale-Master Sheet #SS-3 White Striping and Sheet #SS-2 Black Striping to make the white and black markings that go on the outer sides of each wheel disk.
The main fenders are really delicate so after carefully removing them from their pour stubs I used a dulled #10 X-Acto blade to adze their edges. I wanted the inside ridge to match the existing ridge on the outside of each fender. All of the fender extensions were left on their carriers to ease the process of painting and decaling. The color for the fenders was made from Floquil Railroad Colors. I mixed a little Reefer White into Reefer Orange to take the orange down some, and then I mixed in some Floquil Tuscan to darken the tint. I tried to match the color to photos taken of the rovers on the moon. After all sides of the fender parts were painted the insides of the fenders and the extensions were airbrushed with Testor’s Medium Gray and then an overcoat misting of Testor’s Gunship Gray. Both front fender dust flaps (part 27) were base painted with Testor’s Dark Ghost Gray then over-sprayed with the Medium and Gunship gray on the insides like the rest of the fender parts. The American flag decals on the fender extensions were applied over a white decal rectangle taken from the “spares” box. The final step was to take a mix of Floquil’s Gloss and Flat Clear and overcoat the outside surfaces of the fenders and extensions.
Now it was on to the chassis frame, I assembled the forward chassis section (Part 3) to the four torsion bar receptacles and after airbrushing the battery covers flat white and masking them, the frame was airbrushed with Testor’s Light Gray. Using thinned Testor’s Medium Gray, the battery covers were then accented. The rear chassis (part 2) was assembled with the remaining torsion bar receptacles, and its inner support (part 6) were also painted light gray. After drying, parts 2 & 6 were assembled together. Next, all of the torsion bars, made out of the .025 styrene rod were attached and brush painted with the Testor’s Non-Buffing Aluminum. The center chassis was then assembled and the frame was painted with the light gray. After the frame was masked, the floorboards were airbrushed with the Testor’s Non-Buffing Aluminum. To attach the three chassis sections, I super glued the sections together and then drilled a .028 hole through the inside of the center chassis frame into each side frame member of the front and rear chassis assemblies. Then a length of .025 stainless steel wire was glued into each hole to support the weight of rest of the vehicle and the seated crewman. I didn’t bother to fill in the holes, as the seat assemblies and the footrests would cover them. The brackets on the side of the center chassis were painted with flat white and the white and black markings were cut out of decal material.
There was a little flash on the webbing on the seat backs, so a lot of care was taken when cleaning the edges of the webbing and the tubular frame, as they are very fragile. The seat bottoms were painted separately from the seat backs. I airbrushed the bottom seats parts flat white and after masking, I airbrushed both the canvas covering of the seat bottoms and the webbing on the seat backs with Testor’s Sand. After drying, the horizontal webbing members on the seat backs were brush painted with Testor’s Non-Specular Sea Blue, and the frame was hand brushed with the light gray. The seat parts were then weathered with Testor’s Medium Gray and drybrushed with Testor’s Camouflage Gray. After drying, the carrier was sanded off of the seat backs and the parts glued together with CA glue.
For the assembly of the High-Gain Antenna, I followed the kit’s assembly instructions with the following changes. Prior to step one, I painted the groves in the resin former black so that when the wire mesh is applied, the groves are still visible, as this would help later in the alignment of the ribs. I then proceeded through step five. In step six, after gluing the inner end of each rib to the etched disc, I only tacked the outer end of the ribs to the wire screen. Then I proceeded to complete steps seven and eight. (You will find that after attaching the deployment mechanism central core (part 31) to the ribs they are strong enough to survive the removal of the antenna from the former and your chances of gluing the screen to the former is considerably lessened.) After I had attached part 31 to the inner ends of the ribs, I went back and re-attached any rib outer ends that had popped loose. (In my kit, the curvature of the ribs was not quite the same as the curvature of the resin former.) I then proceeded to step ten and cut the antenna off of the former. After it was loose, most of the rib ends had again popped loose, this turned out to be a good thing as I found it much easier to trim the edges of the wire screen without the ends of the ribs being glued down. It was also easier to attach the length of the ribs to the wire screen without the resin former. I could put my finger under the mesh and carefully glue the rib down. After all of the ribs ends were re-glued, I carefully brush painted the ribs with the Testor’s Non-Buffing Aluminum. I did change the length of the large rod called out in step 7 of the general directions that goes between part 45 and 49 to 1/2” instead of 3/4”. This looked a little more in-scale to me based on the LRV lunar surface photos.
I replaced the resin “mast” which supports the High-Gain antenna. The new support included a replacement for the short steel rod and was, I felt, more structurally sound. It includes two telescoping steel tubes and a length of .025 K & S stainless steel music wire. The existing resin part was used as a guide in cutting the lengths for the new parts. The larger steel tube is approximately .060 O.D. and .042 I.D., while the smaller tube is about .040 O.D. and .028 I.D. I replaced the small length of .025 steel music wire included in the kit with a longer piece that ran the length of the support.
The Storage Pallet Assembly was built as per step 4 in the instructions; the only exception was that I painted all of the major pallet parts light gray instead of flat white. Part 19, the Control & Display Console, was painted flat white, masked, and the face painted flat black. When dry, the dials and switches were drybrushed with Camouflage Gray and the details painted, I used the same color mix for the arm rest as was used on the fenders. The hand Controller (Parts 22A, 22B) was assembled, painted flat white and attached. after painting the handle of the Lunar Communications Relay Unit (LCRU) (Part 9), white and the left side instrument panel black, the rest of the unit was covered with a deep gold foil. The Television Control Unit (TCU) (Part 32) and TV Camera (Part 21) also had foil applied after being painted. The thermal control mirrors on the TCU and camera were made out of Silver Shrink Mirror. The parts for the 16mm Camera and Low-Gain Antenna were assembled after being painted, the only change being the replacement of the support rod for the Low-Gain Antenna with a piece of .025 steel music wire. Finally the outer wings of the footrests were removed and the footrests were air brushed with Testor’s Non-Buffing Aluminum. All of the subassemblies were then set aside until after the chassis and suspension were put together.
To attach the wheels to the chassis I created a 1/2” plywood base jig and on it, located the wheelbase and wheel width and then drilled holes to accept the .050 steel rods that were in the bottom of the wheels. The center of the jig was built up so that the chassis sat 15-1/2 scale inches above the bottom of the wheels and located so that the wheels were in line with the velocity-square dampers (Part 26). The jig center section had the same dimensions as those of the LRV center chassis. The chassis was then spot-glued with Aleene’s Tacky Glue directly to the center section of the jig and the wheels were placed into their locator holes. This is why it’s important that the locator holes drilled into the bottom of the wheels be as straight as possible, as they will determine the look of the vehicle after the suspension pieces are put on. To complete the suspension was a simple matter of cutting the .035 styrene rod provided in the kit to the correct lengths and adapting the velocity-square dampers to the top of the wheel and chassis. I used Zap-A-Gap CA to secure all of these parts. The dampers were pre-painted while the rods were brushed painted with the non-buffing aluminum after the vehicle was removed from the jig. While the vehicle was still glued to the jig, I attached the fender parts to the wheel. The instruction sheet implies that you do this prior to attaching the wheels to the suspension, but I wanted the fenders to be lined up with the vehicle’s local horizon. I used small strips of black shrink tubing cut to 1/32” wide for the runners on the main fender parts. The extensions were then attached to the shrink tube runners. After all suspension parts were applied the tacky glue was wetted and the vehicle carefully lifted off of the jig.
The last steps were to apply all of the subassemblies to the vehicle. I used the jig as support while attaching the seats, control console, footrests, aft equipment rack, antenna assemblies and cameras. I went to an electronics supply store and got the thinnest white insulated wire I could find and used it for the cabling between the antenna, the camera and their control assemblies.
The vehicle scales out very well to the documentation that I have. The 90” wheelbase measured out exactly, while the distance from between left and right wheels ended up being 75” instead of the 72” that my documentation shows. This was done so that the wheels would sit in the tracks on the lunar landscape base supplied with the kit. If one wants to include the hinging mechanisms between the chassis section then some modifications might have to be made to the forward and aft chassis frames to keep the wheelbase at 90”. The width of each wheel is right-on at 9” and the diameter is also correct at 32.19” (Yea, like I could really measure that .19”!) The finished diameter of my HGA mesh measured out to 33”, while the diameter that I have for the real thing says it should be 38”. This difference could very well be caused by my construction method as there certainly can be some leeway in the final diameter based on how one attaches the ribs to the center disk. The seats appear to be a bit too wide and the configuration of the seat covers is not the same as the lunar vehicles. This would be very hard to change and I don’t think it would be worth the hassle.
All in all, this is a really great kit! The build-up went relatively smoothly, the only problems I encountered were related to my unfamiliarity with the media used in the kit. I also had some difficulty with the HGA build-up. The results, however, were well worth the work. When finished, the kit looks great and you get a very complete, visually stunning replica of the LRV.



